


3D视觉检测系统技术
作者:广东中天智能设备有限公司
浏览:
发表时间:2024-10-12 00:00:00
3D视觉检测系统技术
一、3D视觉测量原理
目前市场上常见的有四种3D视觉技术,双目视觉、TOF、结构光和激光三角测量。
1.双目技术
双目技术是目前较为广泛的3D视觉系统,它的原理就像我们人的两只眼睛,用两个视点观察同一景物,以获取在不同视角下的感知图像,然后通过三角测量原理计算图像的视差
来获取景物的三维信息。

由于双目技术原理简单,不需要使用特殊的发射器和接收器,只需要在自然光照下就能获得三维信息,所以双目技术具有系统结构简单、实现灵活和成本低的优点,适合于制造现
场的在线、产品检测和质量控制,不过双目技术的劣势是算法复杂,计算量大,而且光照较暗或者过度曝光的情况下效果差。
2.TOF飞行时间法成像技术
TOF是Time Of Flight的简写,它的原理通过给目标物连续发送光脉冲,然后用传感器接收从物体返回的光,通过探测光脉冲的飞行时间来得到目标物距离。

TOF的核心部件是光源和感光接收模块,由于TOF是根据公式直接输出深度信息,不需要用类似双目视觉的算法来计算,所以具有响应快、软件简单、识别距离远的特点,而且由
于不需要进行灰度图像的获取与分析,因此不受外界光源物体表面性质影响,不过TOF技术的缺点是分辨率低、不能精密成像、而且成本高。
3.3D结构光技术
它通过一个光源投射出一束结构光,这结构光可不是普通的光,而是具备一定结构(比如黑白相间)的光线,打到想要测量的物体上表面,因为物体有不同的形状,会对这样的一些
条纹或斑点发生不同的变形,有这样的变形之后通过算法可以计算出距离、形状、尺寸等信息,从而获得物体的三维图像。
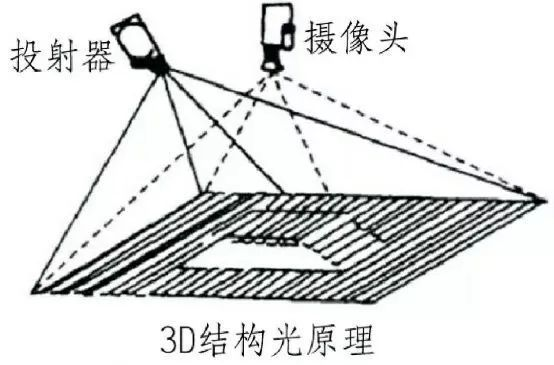
由于3D结构光技术既不需要用很精准的时间延时来测量,又解决双目中匹配算法的复杂度和鲁棒性问题,所以具有计算简单、测量精度较高的优势,而且对于弱光环境、无明显纹理
和形状变化的表面,同样都可进行精密测量,所以越来越多的3D视觉高端应用采用结构光技术。
4.激光三角测量法
基于光学三角原理,根据光源、物体和检测器三者之间的几何成像关系来确定空间物体各点的三维坐标。

通常用激光作为光源,用CCD相机作为检测器,具有结构光3D视觉的优点,精准、快速、成本低,不过由于根据三角原理计算被测物体越远,在CCD 上的位置差别就越小,所以三角测
量法在近距离下的精度很高,但是随着距离越来越远,其测量的精度会越来越差。
二、3D视觉检测系统技术对比
对于这四种3D视觉原理各自的优缺点,我们可以简单总结为以下的表格

从上面的表格可以看出,四种3D视觉测量原理都有各自的优缺点,可以根据自己项目需要选择合适的方案。

点击右上角
分享给朋友吧







 长按图片保存/分享
长按图片保存/分享
0
广告
 摆盘设备
摆盘设备
 摆盘设备
摆盘设备
联系我们
服务热线:
0769-88053906
地址:东莞市寮步镇松湖智谷产业园A3栋3楼大厦18楼

客服微信
抖音
Copyright (©) 2020广东中天智能设备有限公司 备案号:粤ICP备20026220号-1 网站地图
Copyright (©) 2020广东中天智能/深圳市鹏天自动化技术 备案号:粤ICP备20026220号-1
 小中
小中 小智
小智

